This code adds three new capabilities:
- The raw TPS value over CAN is now passed to a TPSxRPM table (6x6) to determine an adjusted TPS value that better reflects the actual engine load given the throttle opening and rpm. Generally, when rpm is low, very little throttle opening is required to achieve maximum engine output, but increasing throttle is required as engine rpm rises. The default table looks like this:
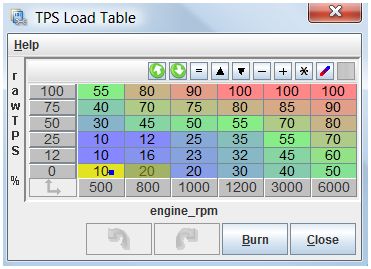
The raw TS value is the vertical axis, and the engine rpm is the horizontal axis. The adjusted TPS is the table value at the intersection of the current raw TPS and RPM. For example, with a TPS of 25%, and an rpm of 3500, the adjusted TPS would be 80%. There is more on this here: http://www.msgpio.com/manuals/mshift/V5tune.html#al
- Instead of being TPS only or MAP only, the load can now be a mix of both (for CAN users connected to a compatible MegaSquirt engine ECU). The user can set the percentage of MAP to use. 100% is all MAP with no TPS, while 0% is all TPS with no MAP. This is set under 'General Settings -> Throttle Factors' using a slider. The parameter replaces the old TPS/MAP option (set in the CAN options). The default is 100% (i.e. MAP only). If TPS is used (i.e. slider not set to 100%) then the adjusted TPS (see above) is used in the calculation. There is more on this here: http://www.msgpio.com/manuals/mshift/V5tune.html#gh
- The single shift completion delay factor has been replaced with a 8x1 table of delays by loads. This allows users to set different shift completion delays depending on the load. The shift completion delays affect things like the clutch output duration and CAN spark advance durations, etc. There is more here: http://www.msgpio.com/manuals/mshift/V5tune.html#tc
These changes have been tested briefly, but need much more exhaustive testing, as usual.
BTW, it is possible to mostly recover the previous code behavior with any of these changes (for those that might want to), by:
- setting the slider to 100% (for MAP only), or 0% (for TPS only),
- if using TPS, setting the cells in each row of the 6x6 table to the same value as the TPS bin value for that row, like this:
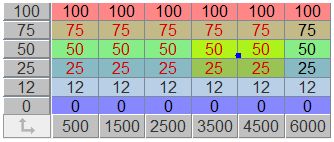
- putting the same shift completion delay value that was used previously in each of the eight cells of the table.
However, it is no longer possible to have different load indices for the 16x9 shift and pressure control tables. Instead, users have to find a combination from the MAP/TPS options above that best reflect the load for both tables. Having different indexes made it impossible to set the pressure in specific gears, or coordinate them is any other rational manner. It also made the code more complicated than it should have been. And the few users who tried the mixed values didn't seem to like them much. However, with the adjustable mix of TPS and MAP, the TPS 6x6 table, as well as the possibility to have different bin values for the two tables, most users should be able to find a configuration that works well for them.
Lance.